
- Zariadenie a opis DPT
- Princíp činnosti
- Druhy DPT
- management
- Oblasti použitia
- Výhody a nevýhody
- Video okrem písaného
Pomôžte rozvoju stránky a zdieľajte článok s priateľmi!
Éra elektromotorov siaha až do 30. rokov XIX storočia, kedy Faraday experimentálne dokázal schopnosť rotácie vodiča, cez ktorý prúdi permanentný magnet. Na tomto princípe Thomas Davenport navrhol a otestoval prvý DC motor. Vynálezca nainštaloval svoje zariadenie na existujúci model vlaku, čím sa preukázala účinnosť elektromotora.
Praktickú aplikáciu DPT našiel B. S. Jacobi, ktorý ho postavil na loď, aby otočil čepele. Zdroj súčasného vedca slúžil 320 galvanizačných buniek. Napriek ťažkopádnemu zariadeniu mohla loď plávať proti prúdu a prepravovať na palube 12 cestujúcich.
Až na konci XIX storočia sa začali vyrábať priemyselné stroje so synchrónnymi elektromotormi. Toto bolo uľahčené uvedomením si princípu premeny mechanickej energie na elektrinu jednosmerným motorom. To znamená, že pomocou elektromotora v režime generátora sa nám podarilo získať elektrinu, ktorej výroba sa ukázala byť podstatne lacnejšia ako náklady na výrobu galvanických článkov. Odvtedy sa elektromotory zlepšili a začali získavať silné pozície vo všetkých oblastiach nášho života.
Zariadenie a opis DPT
Konštrukčne je jednosmerný motor navrhnutý podľa princípu interakcie magnetických polí.
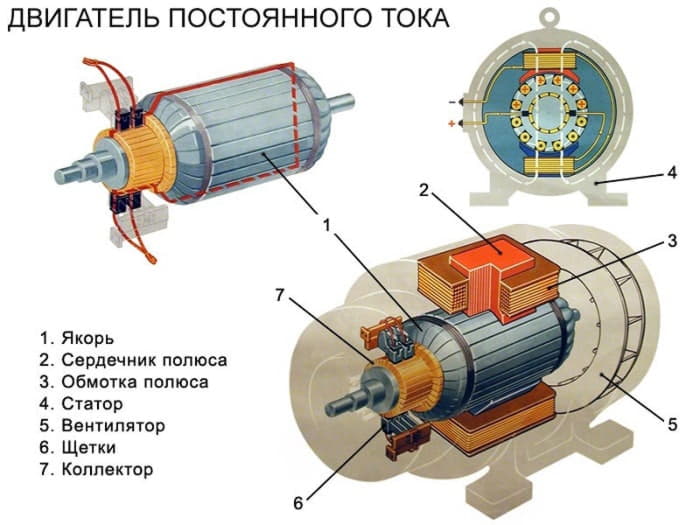
Najjednoduchší DPT pozostáva z nasledujúcich hlavných uzlov:
- Dva vinutia s jadrom zapojeným do série. Táto konštrukcia je umiestnená na hriadeli a tvorí uzol, nazývaný rotor alebo kotva.
- Dva permanentné magnety, otočené rôznymi pólmi na vinutia. Vykonávajú úlohu pevného statora.
- Zberač - dve polkruhové, izolované dosky umiestnené na hriadeli DPT.
- Dva pevné kontaktné prvky (kefy) určené na prenos elektrického prúdu cez kolektor do budiacich vinutí.
Vyššie uvedený príklad je skôr pracovným modelom kolektorového motora. V praxi sa takéto zariadenia neuplatňujú. Faktom je, že taký motor je príliš malý. Funguje trhavý, najmä pri pripojení mechanického zaťaženia.
Stator (induktor)
V modeloch výkonných moderných jednosmerných motorov sa používajú statory, ktoré sú tiež induktory vo forme cievok navinutých na jadrách. Keď je elektrický obvod uzavretý, dochádza k tvorbe magnetických siločiar v dôsledku výslednej elektromagnetickej indukcie.
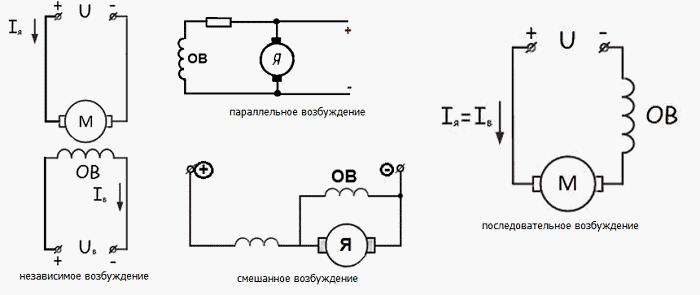
Na napájanie vinutí induktora DPT je možné použiť rôzne schémy zapojenia:
- s nezávislým budením vinutí;
- spojenie paralelne s vinutiami kotvy;
- varianty so sekvenčnou excitáciou rotorových a statorových cievok;
- zmiešané pripojenie.
Schémy zapojenia je možné jasne vidieť na obr.
Každá metóda má svoje výhody a nevýhody. Spôsob pripojenia je často určený podmienkami, za ktorých sa očakáva prevádzka jednosmerného motora. Najmä, ak je potrebné znížiť oblúk kolektora, potom použite paralelné pripojenie. Na zvýšenie krútiaceho momentu je lepšie použiť obvody so sériovým zapojením vinutí. Prítomnosť vysokých štartovacích prúdov vytvára zvýšený elektrický výkon v čase štartovania motora. Tento spôsob je vhodný pre jednosmerný motor, ktorý intenzívne pracuje v krátkodobom režime, napríklad pre štartér. V tomto spôsobe prevádzky nemajú časti elektromotora čas na prehriatie, takže ich opotrebenie je zanedbateľné.
Rotor (kotva)
V príklade primitívneho elektromotora opísaného vyššie sa rotor skladá z dvojzávitovej kotvy na jednom vinutí s odlišnými pólmi. Konštrukcia umožňuje otáčanie hriadeľa motora.
V opísanom zariadení je významná nevýhoda: keď zastavíte rotáciu armatúry, jej vinutia zaberajú stabilne. Na opätovné spustenie elektromotora je potrebné oznámiť hriadeľu určitý moment.
Táto vážna nevýhoda je zbavená kotvy s tromi a veľkým počtom vinutí. Obr. 3 znázorňuje obraz trojväzbového rotora a obr. 4 - kotva s veľkým počtom vinutí.

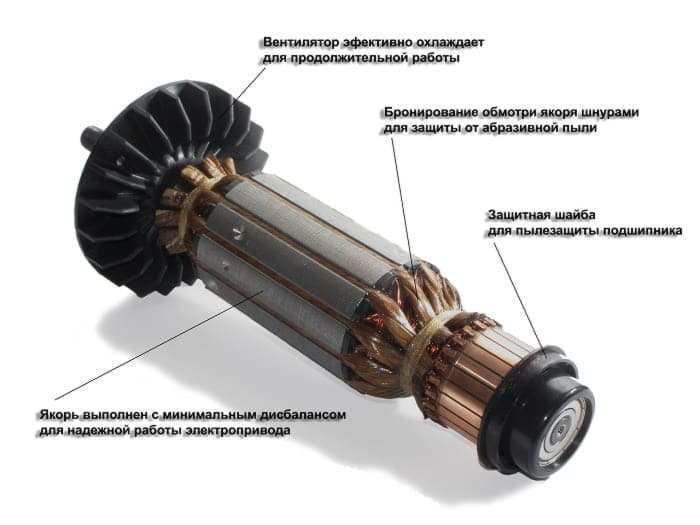
Takéto rotory sa často vyskytujú v malých elektromotoroch s malým výkonom.
Na konštrukciu výkonných trakčných motorov as cieľom zvýšiť stabilitu frekvencie otáčania sa používa kotva s veľkým počtom vinutí. Schéma takéhoto motora je znázornená na obr.
zberateľ
Ak je k pinom vinutia rotora pripojené jednosmerné napájanie, kotva bude trvať pol otáčky a zastaví sa. Pre pokračovanie procesu rotácie je potrebné zmeniť polaritu vstupného prúdu. Zariadenie, ktoré vykonáva funkciu spínacieho prúdu s cieľom zmeniť polaritu na svorkách vinutí, sa nazýva kolektor.
Najjednoduchší kolektor pozostáva z dvoch izolovaných polkruhových dosiek. Každý z nich v určitom bode v kontakte s kefou, ktorý uvoľňuje napätie. Jedna lamela je vždy pripojená na plus a druhá na mínus. Keď sa hriadeľ otočí o 180 °, dosky kolektorov zmenia miesta, v dôsledku čoho dôjde k novej komutácii so zmenou polarity.
Rovnaký princíp spínacích výkonových vinutí sa používa vo všetkých kolektoroch, vrátane zariadení s veľkým počtom lamiel (pár pre každé vinutie). Kolektor tak poskytuje spínanie potrebné na nepretržité otáčanie rotora.
V moderných konštrukciách kolektorov sú lamely usporiadané v kruhu takým spôsobom, že každá doska príslušného páru je na diametrálne protiľahlej strane. V dôsledku zmeny polohy hriadeľa sa kotevná reťaz zapne.
Princíp činnosti
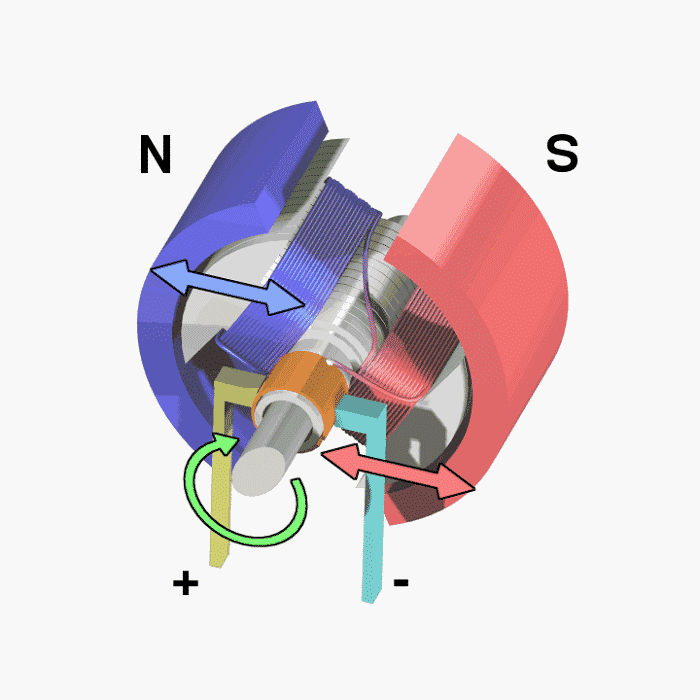
Aj zo školy si uvedomujeme, že živý drôt, umiestnený medzi pólmi magnetu, má tlačnú silu. To sa deje preto, že okolo drôtu sa pozdĺž jeho celej dĺžky vytvára magnetické pole. Výsledkom interakcie magnetických polí je výsledná sila „Amperov“:
F = B × I × L, kde B znamená veľkosť magnetickej indukcie poľa, I je prúd, L je dĺžka vodiča.
Vektor Amperova je vždy kolmý na čiary magnetického toku medzi pólmi. Schematicky je princíp činnosti znázornený na obr. 6.
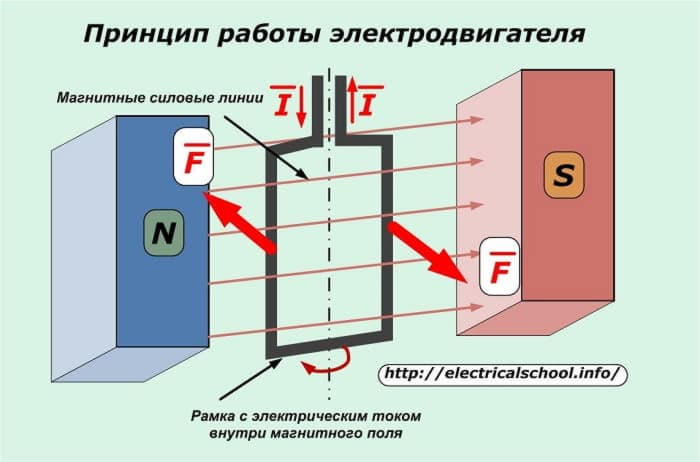
Ak namiesto priameho vodiča vezmeme obrysový rám a pripojíme ho k zdroju prúdu, otočí sa o 180 ° a zastaví sa v takej polohe, že výsledná sila bude rovná 0. Pokúsme sa posunúť rám. Vracia sa do východiskovej pozície.
Zmeňte polaritu prúdu a skúste znova: rám urobil ďalšiu pol otáčky. Je logické predpokladať, že je potrebné zmeniť smer prúdu vždy, keď zodpovedajúce závity vinutí prechádzajú bodmi zmeny pólov magnetov. Na tento účel bol kolektor vytvorený.
Schematicky si môžete predstaviť každé vinutie kotvy vo forme samostatného obrysového rámu. Ak existuje niekoľko vinutí, potom sa v každom okamihu jeden z nich priblíži k magnetu statora a je ovplyvnený vztlakovou silou. Takto sa udržuje kontinuálne otáčanie kotvy.
Druhy DPT
Existujúce jednosmerné motory možno klasifikovať podľa dvoch hlavných znakov: prítomnosťou alebo neprítomnosťou zostavy kefového zberača v konštrukcii motora a typu magnetického systému statora.
Zvážte hlavné rozdiely.
Prítomnosťou jednotky zberača kefy
Jednosmerné motory na spínacie vinutia, ktoré používajú uzly zberača, sa nazývajú kolektorové. Zahŕňajú širokú škálu modelov elektromotorov. V konštrukcii sú použité motory, v ktorých sa používa až 8 uzlov zberača.
Funkcie rotora môžu vykonávať permanentný magnet a prúd z elektrickej siete sa privádza priamo do vinutí statora. V tomto uskutočnení nie je potreba kolektora a problémy spojené so spínaním sa riešia elektronicky.
U takýchto bezkartáčových motorov je eliminovaná jedna z nevýhod - iskra, čo vedie k intenzívnemu opotrebeniu kolektorových dosiek a kefiek. Okrem toho sú jednoduchšie na udržanie a zachovanie všetkých užitočných vlastností DCF: jednoduchosť riadenia spojená s kontrolou rýchlosti, vysokou účinnosťou a ďalšími indikátormi. Bezkartáčové motory sa nazývajú ventilové motory.
Podľa typu konštrukcie magnetického systému statora
Pri konštrukcii synchrónnych motorov existujú modely s permanentnými magnetmi a DC s budiacimi vinutiami. Elektromotory radu, v ktorých sa používajú statory s budiacim prúdom z vinutí, sú celkom bežné. Poskytujú stabilnú rýchlosť otáčania hriadeľov, vysoký nominálny mechanický výkon.
Spôsoby pripojenia statorových vinutí boli diskutované vyššie. Opäť zdôrazňujeme, že elektrické a trakčné charakteristiky jednosmerných motorov závisia od voľby schémy zapojenia. Sú rozdielne v sériových vinutiach av cievkach s paralelným budením.
management
Nie je ťažké pochopiť, že ak sa zmení polarita napätia, zmení sa aj smer otáčania armatúry. To uľahčuje ovládanie motora manipuláciou s polaritou kefiek.
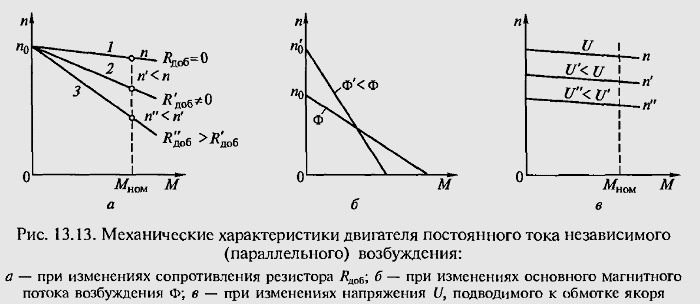
Mechanická charakteristika
Uvažujme graf frekvencie verzus moment sily na hriadeli. Vidíme priamku so záporným sklonom. Toto priamo vyjadruje mechanickú charakteristiku jednosmerného motora. Pre svoju konštrukciu si zvoľte určité pevné napätie, ktoré sa spočíta na výkon rotorových vinutí.
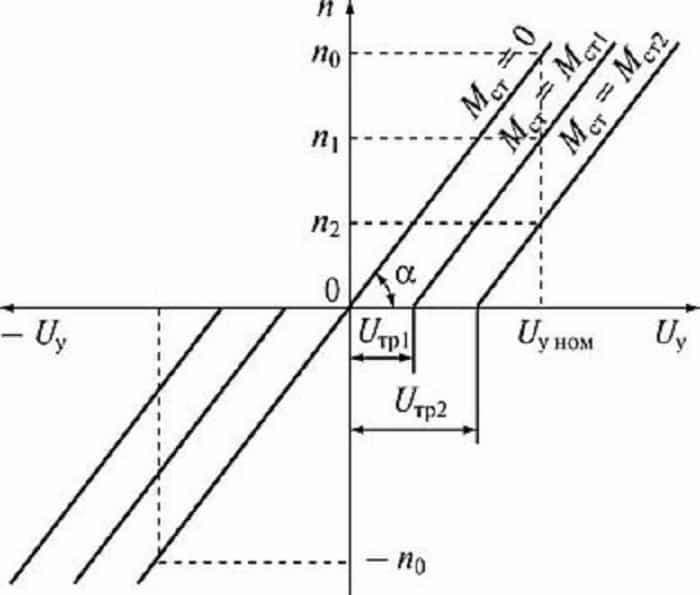
Kontrolná charakteristika
Rovnaký priamy, ale s pozitívnym sklonom, je grafom frekvencie otáčania kotvy od napájacieho napätia. Toto je regulačná charakteristika synchrónneho motora.
Stavba stanoveného harmonogramu sa realizuje v určitom momente vyvinutého DPT.
Z dôvodu linearity charakteristík je riadenie jednosmerných motorov zjednodušené. Pretože sila F je úmerná prúdu, zmenou jeho hodnoty, napríklad premenlivým odporom, je možné regulovať parametre motora.
Nastavenie otáčok rotora sa dá ľahko dosiahnuť zmenou napätia. V kolektorových motoroch využívajúcich štartovacie odpory dosahujú plynulé zvyšovanie rýchlosti, čo je obzvlášť dôležité pre trakčné motory. Je to tiež jedna z účinných brzdových metód. Okrem toho v režime spomalenia generuje synchrónny elektromotor elektrickú energiu, ktorá sa môže vrátiť do siete.
Oblasti použitia
Vymenovanie všetkých oblastí použitia elektromotorov môže byť nekonečne dlhé. Napríklad len niekoľko z nich:
- elektrické náradie pre domácnosť a priemysel;
- automobilový priemysel - okná, ventilátory a iné automatiky;
- Električky, trolejbusy, elektromobily, žeriavy a iné mechanizmy, pre ktoré sú dôležité vysoké trakčné vlastnosti.
Výhody a nevýhody
Medzi výhody patrí:
- Lineárna závislosť charakteristík elektromotorov s jednosmerným prúdom (priame vedenia) zjednodušuje riadenie;
- Ľahko nastaviteľná rýchlosť;
- dobré východiskové charakteristiky;
- kompaktná veľkosť.
Pri asynchrónnych motoroch, ktoré sú striedavými motormi, je veľmi ťažké dosiahnuť také charakteristiky.
nevýhody:
- zberač obmedzených zdrojov a kefy;
- dodatočné plytvanie časom na preventívnu údržbu spojenú s údržbou uzlov zberných kief;
- vzhľadom na to, že využívame siete so striedavým napätím, je potrebné napraviť prúd;
- výrobu kotiev.
Podľa uvedených parametrov sa ako víťazi stávajú modely asynchrónnych motorov. V mnohých prípadoch je však použitie jednosmerného motora jedinou možnou možnosťou, ktorá nevyžaduje zložitosť elektrického obvodu.