
Pomôžte rozvoju stránky a zdieľajte článok s priateľmi!
Vzhľadom na skutočnosť, že dodávka elektriny sa tradične uskutočňuje dodávaním striedavého prúdu spotrebiteľom, je zrejmé, že je potrebné vytvoriť elektrické stroje pracujúce na dodávanej elektrickej energii. Najmä striedavý prúd sa aktívne používa v asynchrónnych elektromotoroch, ktoré sa široko používajú v mnohých oblastiach ľudskej činnosti. Zvlášť pozoruhodný je asynchrónny motor s rotorom vačkovej klietky, ktorý z viacerých dôvodov zaujal v aplikácii silnú pozíciu.
Tajomstvo takejto popularity spočíva predovšetkým v jednoduchosti dizajnu a nízkych nákladoch na jeho výrobu. Elektromotory na krátkych rotoroch majú ďalšie výhody, ktoré sa dozviete z tohto článku. A najprv zvážte konštrukčné vlastnosti tohto typu elektromotorov.
dizajn
Každý elektromotor má dve dôležité pracovné časti: rotor a stator. Sú uzavreté v ochrannom puzdre. Na hriadeli rotora je inštalovaný ventilátor na chladenie vodičov vinutia. Toto je všeobecný princíp štruktúry všetkých typov elektromotorov.
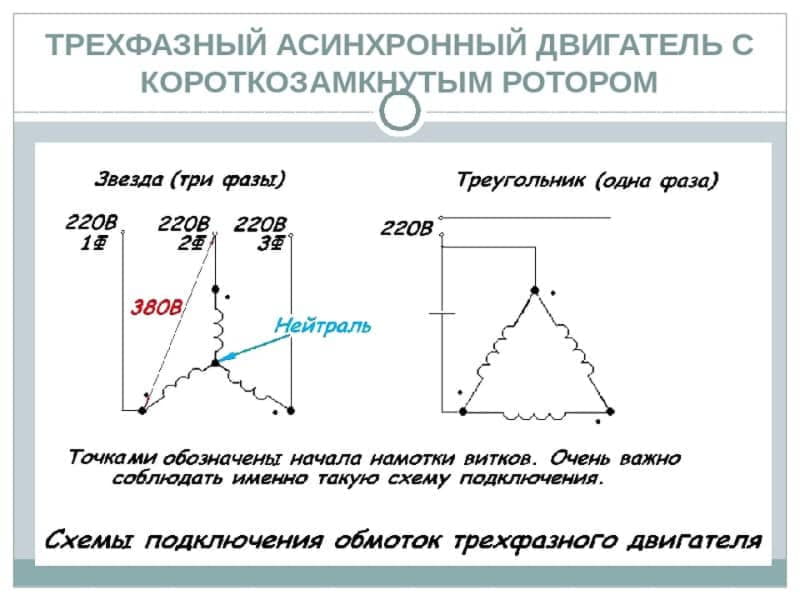
Konštrukcie statorov uvažovaných elektromotorov sa nelíšia od konštrukcie týchto častí v iných typoch elektromotorov pracujúcich v sieťach striedavého prúdu. Jadrá statora určené na prácu s trojfázovým napätím sú usporiadané v kruhu pod uhlom 120 °. Sú inštalované na vinutiach izolovaného medeného vodiča určitého prierezu, ktoré sú spojené trojuholníkom alebo hviezdou. Konštrukcia magnetického obvodu statora je pevne namontovaná na stenách valcového telesa.
Štruktúra elektromotora je zrejmá z obr. 1. Všimnite si konštrukciu vinutí bez jadra v skrátenom rotore.
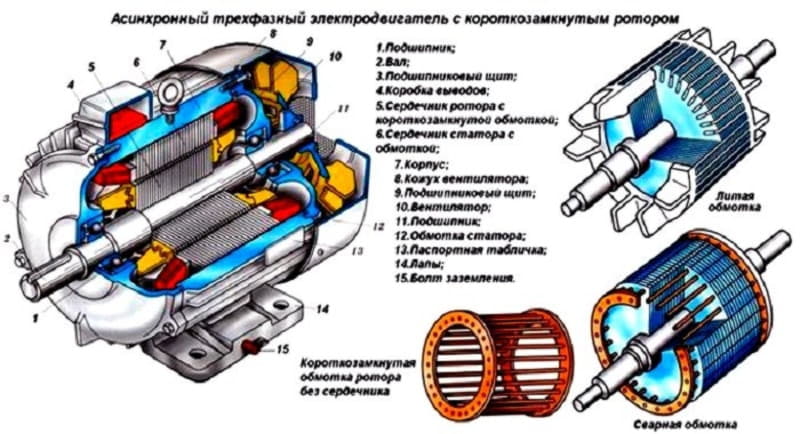
Rotor je mierne odlišný. Konštrukcia jeho vinutia je veľmi podobná klietke veveričky. Pozostáva z hliníkových tyčí, ktorých konce uzatvárajú skratové krúžky. V motoroch s vysokým výkonom sa môže použitie medených tyčí považovať za skratové vinutia rotora. Tento kov má nízku odolnosť, ale je drahší ako hliník. Okrem toho sa meď taví rýchlejšie, čo nie je žiaduce, pretože vírivé prúdy môžu jadro silne ohrievať.
Štruktúrne sú tyče umiestnené na hornej strane jadier rotora, ktoré pozostávajú z transformátorovej ocele. Pri výrobe rotorov sú jadrá namontované na hriadeli a vodiče vinutia tlačia (nalievajú) do drážok magnetického obvodu. Nie je potrebné izolovať drážky jadra. Obrázok 2 zobrazuje fotografiu rotora so skratovými vinutiami.

Magnetické dosky takýchto rotorov nevyžadujú izoláciu povrchov lakom. Veľmi ľahko sa vyrábajú, čo znižuje náklady na asynchrónne elektromotory, ktoré predstavujú až 90% celkového počtu elektromotorov.
Rotor sa otáča asynchrónne vnútri statora. Medzi týmito časťami sa nastavuje minimálna vzdialenosť vo forme vzduchových medzier. Optimálna vôľa je medzi 0, 5 mm a 2 mm.
V závislosti od počtu použitých fáz možno asynchrónne elektromotory rozdeliť do troch typov:
- jedna fáza;
- dvojfázová;
- tri fázy.
Líšia sa počtom a umiestnením vinutí statora. Modely s trojfázovými vinutiami sa vyznačujú vysokou stabilitou pri menovitom zaťažení. Majú najlepšie východiskové charakteristiky. Tieto elektromotory často používajú jednoduchú štartovaciu schému.
Dvojfázové motory majú dve kolmo usporiadané statorové vinutia, z ktorých každé prijíma striedavý prúd. Často sa používajú v jednofázových sieťach - jedno vinutie je pripojené priamo na fázu a na napájanie druhého sa používa kondenzátor fázového posunu. Bez tejto časti sa otáčanie hriadeľa asynchrónneho elektromotora nezačne samostatne. Vzhľadom k tomu, že kondenzátor je integrálnou súčasťou dvojfázového elektromotora, tieto motory sa tiež nazývajú kondenzátorové motory.
Pri konštrukcii jednofázového elektromotora sa používa len jedno pracovné vinutie. Na spustenie rotácie rotora sa použije indukčná spúšťacia cievka, ktorá je krátko pripojená k sieti cez kondenzátor alebo skratovaná. Tieto motory s malým výkonom sa používajú ako elektrické pohony pre niektoré domáce spotrebiče.
Princíp činnosti
Činnosť asynchrónneho motora sa uskutočňuje na základe trojfázovej prúdovej vlastnosti, ktorá je schopná vytvárať rotujúce magnetické pole vo vinutiach statora. V uvažovaných elektromotoroch je synchrónna frekvencia otáčania elektromagnetického poľa priamo úmerná charakteristickej frekvencii striedavého prúdu.
Existuje nepriamo úmerná závislosť rýchlosti otáčania na počte párov pólov vo vinutiach statora. Vzhľadom na to, že fázový posun je 60 °, závislosť rýchlosti rotora (v otáčkach za minútu) môže byť vyjadrená vzorcom:
n1 = ( f 1 * 60) / p, kde n1 je synchrónna frekvencia, f1 je frekvencia striedavého prúdu a p je počet párov pólov.
V dôsledku magnetickej indukcie na jadre rotora v ňom vznikne emf, ktorý zase spôsobí vznik elektrického prúdu v uzavretom vodiči. Vznikne silová sila, pri ktorej sa uzatvorená slučka začne otáčať po magnetickom poli. Pri menovitom režime prevádzky sa otáčky rotora mierne otáčajú za rýchlosťou otáčania magnetického poľa vytvoreného v statore. Keď sa frekvencie zhodujú, magnetický tok sa zastaví, prúd zmizne vo vinutí rotora, v dôsledku čoho sa sila zastaví. Akonáhle sa rýchlosť otáčania hriadeľa oneskorí, striedavé prúdy magnetických polí obnovia pôsobenie ampérovej sily.
Rozdiel vo frekvencii rotácie magnetických polí sa nazýva sklzová frekvencia: n s = n 1 –n 2 a relatívna hodnota s, ktorá charakterizuje oneskorenie, sa nazýva sklz.
s = 100% * ( n s / n 1 ) = 100% * (n 1 - n 2 ) / n 1, kde n s je frekvencia sklzu; n 1, n 2 - frekvencia otáčania magnetického poľa statora a rotora.
Aby sa znížili harmonické hodnoty EMF a vyhladili pulzy krútiaceho momentu, prúty krátkych spojov trochu kosia. Zoberme si ďalší pohľad na pic. 2 a venovať pozornosť umiestneniu tyčí, ktoré pôsobia ako vinutia rotora, vzhľadom na os otáčania.
Sklz závisí od mechanického zaťaženia hriadeľa motora. V asynchrónnych elektromotoroch nastáva zmena parametrov prešmykovania v rozsahu od 0 do 1. Okrem toho v režime voľnobehu rotor, ktorý získal hybnosť, takmer nevykazuje aktívny odpor. S sa blíži nule.
Zvýšenie zaťaženia prispieva k zvýšeniu sklzu, ktorý môže dosiahnuť jednotka v čase zastavenia motora v dôsledku preťaženia. Takýto stav je ekvivalentný skratovému režimu a môže zariadenie vypnúť.
Relatívna veľkosť oneskorenia zodpovedajúceho menovitému zaťaženiu elektrického stroja sa nazýva nominálny sklz. Pre elektromotory s nízkym výkonom a motory s priemerným výkonom sa tento indikátor mení v malom rozsahu - od 8% do 2%. Keď je rotor motora stacionárny, sklz má tendenciu k 0 a pri prevádzke na voľnobehu sa približuje k 100%.
Počas štartu elektromotora sú jeho vinutia zaťažené, čo vedie k prudkému nárastu spínacích prúdov. Po dosiahnutí menovitého výkonu elektrické motory so skratovanými cievkami nezávisle obnovujú menovitú frekvenciu rotora.
Dbajte na krivku krútiaceho momentu znázornenú na obr. 3.

S rastúcim krútiacim momentom sa koeficient s mení z 1 na 0 (pozri časť „oblasť motora“). Tiež zvyšuje rýchlosť otáčania hriadeľa. Ak rýchlosť otáčania hriadeľa prekročí menovitú frekvenciu, potom sa krútiaci moment stane záporným a motor pôjde do režimu generovania (segment „generujúcej oblasti“). V tomto režime bude mať rotor magnetický odpor, čo povedie k brzdeniu motora. Oscilačný proces sa bude opakovať dovtedy, kým sa krútiaci moment nestabilizuje a sklz sa blíži nominálnej hodnote.
Výhody a nevýhody
Široké používanie asynchrónnych motorov s rotormi s krátkym okruhom je vďaka ich nesporným výhodám:
- stabilita práce pri optimálnom zaťažení;
- vysoká spoľahlivosť pri prevádzke;
- nízke prevádzkové náklady;
- životnosť prevádzky bez údržby;
- relatívne vysoká účinnosť;
- nízke náklady v porovnaní s modelmi na báze fázových rotorov as inými typmi elektromotorov.
Medzi nedostatkami možno konštatovať:
- vysoké štartovacie prúdy;
- citlivosť na poklesy napätia;
- nízke pomery sklzu;
- potreba použitia zariadení, ako sú frekvenčné meniče, štartovacie odpory atď. na zlepšenie vlastností elektromotora;
- ED s rotorom vačkovej klietky potrebujú dodatočné spínacie riadiace zariadenia v prípadoch, keď je potrebné nastaviť rýchlosť.
Elektromotory tohto typu majú slušné mechanické vlastnosti. Napriek nedostatkom vedú v súvislosti s ich uplatňovaním.
Hlavné technické vlastnosti
V závislosti od triedy motora sa jeho technické vlastnosti líšia. V rámci tohto článku sa nekladie úloha znižovania parametrov všetkých existujúcich tried motorov. Zameriame sa na popis hlavných technických charakteristík elektromotorov tried 56 A2 - 80 B2.
V tejto malej medzere na modelovej línii elektromotorov s rotormi s krátkym okruhom je možné poznamenať:
Rozsah výkonu od 0, 18 kW (trieda 56 A2) do 2, 2 kW (trieda 80 B2).
Prúd pri maximálnom napätí je od 0, 55 A do 5A.
Účinnosť od 66% do 83%.
Rýchlosť otáčania hriadeľa pre všetky modely zo špecifikovaného rozsahu je 3000 ot / min.
Špecifikácie konkrétneho motora sú uvedené v jeho cestovnom pase.
prípojka
Vinutia statora trojfázového ADKR sa môžu pripojiť podľa schémy „trojuholník“ alebo „hviezda“. Hviezdička zároveň vyžaduje vyššie napätie ako trojuholník.
Všimnite si, že elektrický motor pripojený rôznymi spôsobmi k rovnakej sieti spotrebuje iný výkon. Preto nemôžete pripojiť elektromotor, určený pre schému "hviezda" na princípe trojuholníka. Aby sa však znížili štartovacie prúdy, je možné prepínať čas spúšťania kontaktov hviezdy v trojuholníku, ale potom sa tiež znižuje počiatočný moment.
Schémy zapojenia sú zrejmé z obrázku 4.
Na pripojenie trojfázového elektromotora na jednofázový prúd sa používajú prvky fázového posunu: kondenzátory, odpory. Príklady takýchto pripojení sú zobrazené na obrázku 5. Môžete použiť hviezdu aj trojuholník.
Na riadenie činnosti motora sú k elektrickému obvodu statora pripojené ďalšie zariadenia.