
- úvod
- Ovládanie motora s Arduino a generovaný PWM signál
- Riadenie jednosmerného motora pomocou H-mosta
- Čo je ovládač L298N?
- Princíp riadenia motora s Arduino a vodičom L298N
- Jednoduchý príklad Arduina s ovládačom L298N
Pomôžte rozvoju stránky a zdieľajte článok s priateľmi!
V tomto príklade sa pozrieme na jeden zo spôsobov ovládania jednosmerného motora, ktorý sa realizuje prostredníctvom dosky Arduino a ovládača L298N. Napriek veľkému množstvu možností ovládania prevádzky elektrických strojov na jednosmerný prúd je táto schéma oveľa populárnejšia. Vzhľadom k tomu, že môže byť použitý na vykonávanie pomerne širokej škály rôznych operácií, v porovnaní s obvodmi používajúcimi iné ovládače a mikrokontroléry.
úvod
Elektrický stroj s jednosmerným prúdom je jedným z najľahších na prevádzku, vďaka čomu sa často používa v rádiovej elektronike a robotických zariadeniach. Táto popularita je spôsobená jednoduchosťou výkonu a kontroly - na tento účel sú dva póly napájané zo zdroja emf (záporné a kladné) a keď prúd prúdi cez vinutia, hriadeľ sa otáča. Pri zmene polarity motora dochádza k spätnému pohybu.
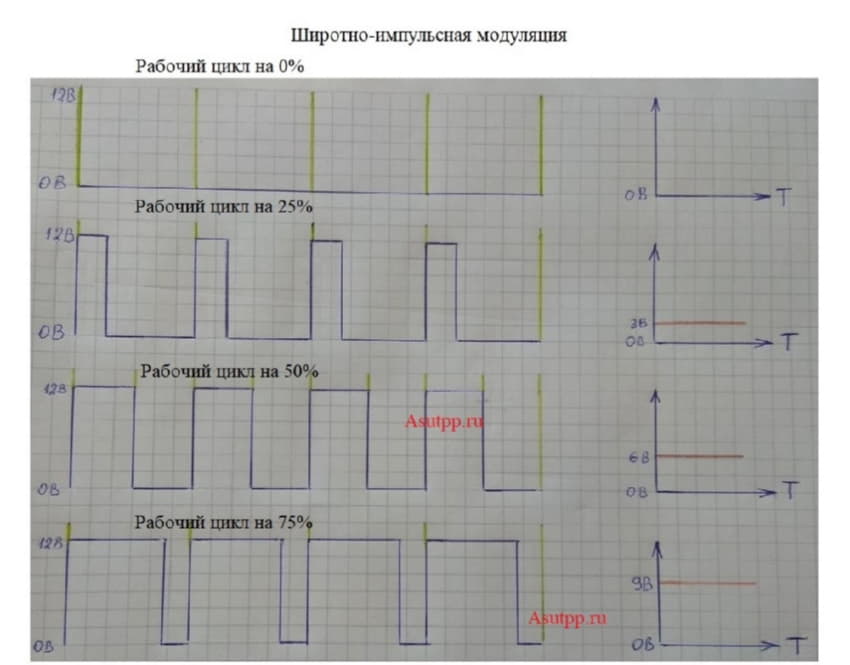
V systémoch rádiovej elektroniky sa takéto spôsoby riadenia prevádzky motora nazývajú modulácia šírky impulzu (PWM). Takýto proces je charakterizovaný zmenou trvania použitého napätia alebo tvaru jeho signálu.
Ako môžem zmeniť rýchlosť otáčania pomocou PWM?
Pomocou metódy PWM striedavo aplikujete a odpájate napätie na vinutie motora s vysokou frekvenciou. Frekvencia impulzov môže dosiahnuť niekoľko kilohertzov.
Veľkosť priemerného napätia aplikovaného na motor závisí od tvaru vlny PWM. Tvar signálu je potom určený pracovným cyklom, ktorý môže byť reprezentovaný ako pomer času dodávky signálu k celkovej perióde (súčet napájacieho napätia a času vypnutia). Výsledkom je bezrozmerné množstvo, ktoré je vyjadrené v percentuálnom vyjadrení - koľko času z celkového obdobia bolo napätie aplikované na motor. V systémoch s nízkym napätím 5, 12, 24 alebo 36 V sa používa cyklus pri 25%, 50%, 75% a 100%.
Ovládanie motora s Arduino a generovaný PWM signál
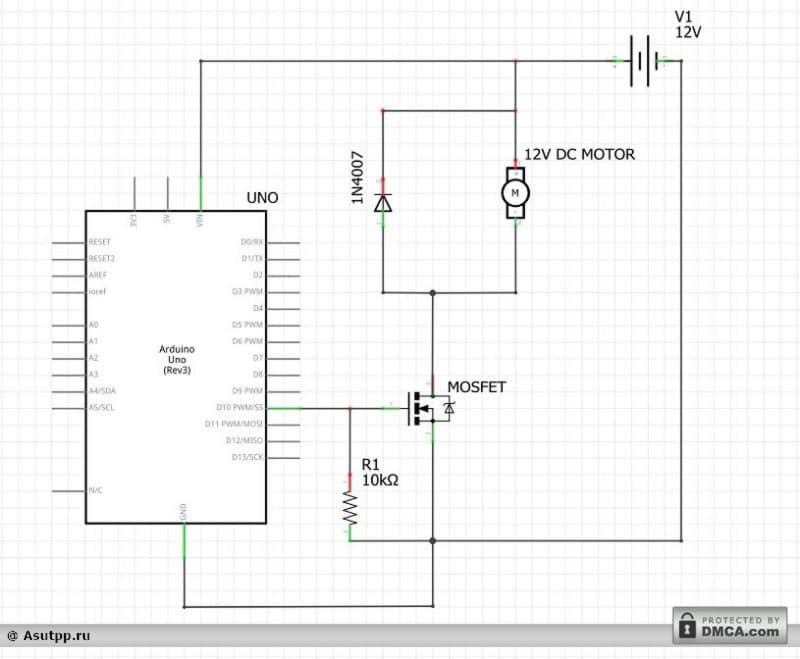
Na spustenie procesu generuje doska signál, ktorý sa privádza do vinutí motora. Na riadenie veľkosti signálu privádzaného do pracovného obvodu sa zapne tranzistor. Ktorý je zahrnutý v medzere siete, a na jeho základni je kontrolný impulz z Arduina. Nastavením určitých parametrov prevádzky so súborom príkazov pre Arduino, tranzistor pôjde do otvoreného, uzavretého alebo pootvoreného stavu.
Na obrázku nižšie je zobrazený príklad obvodu, v ktorom je motor poháňaný Arduino cez tranzistor. Ako vidíte, tu je z výstupu PWM signál poslaný do základne tranzistora a cez jeho kolektor a emitor bude napätie aplikované na vinutie.
Arduino je možné naprogramovať pomocou počítača, na tento účel sa používajú špeciálne nástroje a klasické programovacie jazyky. Pri programovaní prevádzky zariadenia môžete použiť štandardnú sadu príkazov, ktoré umožnia prístup k najjednoduchším príkazom. Alebo ich zozbierajte v kombinácii, aby vytvorili špecifickú logiku zariadenia.
Príklad softvérových príkazov pre prácu vyššie uvedenej Arduino inklúznej schémy si môžete stiahnuť z odkazu nižšie. Pomocou nich môžete ovládať rýchlosť otáčania, postupne ju zvyšovať na maximálnu hodnotu a postupne ju znižovať až na doraz.
Úplný náčrt projektu:
 Riadenie jednosmerného motora s Arduino UNO (340 bajtov, stiahnuté: 84)
Riadenie jednosmerného motora s Arduino UNO (340 bajtov, stiahnuté: 84)
Použité príkazy:
- void setup - pole pre nastavenie pracovného výstupu z portu PWM;
- void loop - pole na vytvorenie pracovného toku;
- motorSpeed - nastavuje rýchlosť otáčania motora;
- analogWrite - nastavuje prácu konkrétnej výstupnej dosky;
- delay - nastavuje hodnotu časového intervalu.
S týmto programom a vyššie uvedenou schémou môžete ľahko meniť rýchlosť otáčania jednosmerného motora, ale bude veľmi ťažké zmeniť smer jeho otáčania. Vzhľadom k tomu, že je potrebné zmeniť smer prúdenia elektrického prúdu cez vinutia. Preto je zmena smeru otáčania oveľa pohodlnejšia pomocou H-mostíka na polovodičových meničoch.
Riadenie jednosmerného motora pomocou H-mosta
Ak vezmeme do úvahy princíp činnosti, N-most je logický obvod štyroch logických prvkov (relé alebo polovodičový typ), schopný prechodu do dvoch stavov (otvorených a uzavretých). V tomto príklade je most zostavený na polovodičoch. Jednoduchou zmenou párového stavu týchto prvkov sa motor bude otáčať jedným alebo druhým spôsobom bez potreby prepínania kontaktov.
Toto zariadenie získalo svoje meno kvôli vonkajšej podobnosti s písmenom „H“, kde sa každý pár tranzistorov nachádza vo vertikálnych prvkoch písmena a samotný riadený motor je horizontálny. Príklad elementárneho H-mosta štyroch tranzistorov je znázornený na obrázku nižšie. Otváraním a zatváraním potrebných obvodových prvkov v pároch môžete prúdiť cez vinutia v opačných smeroch.
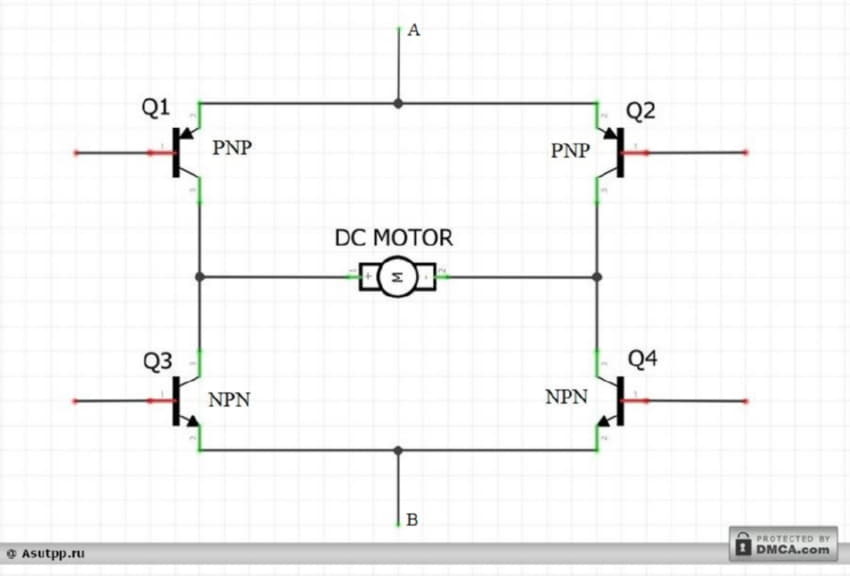
Pozrite sa na obrázok, v tejto schéme riadenie výkonu motora pochádza zo svoriek A a B, na ktoré je aplikovaný riadiaci potenciál.
Princíp určenia smeru otáčania v H-moste je nasledovný:
- keď sa impulz aplikuje na základne tranzistorov Q1 a Q4, aby sa otvoril spoj, prúd preteká vinutiami motora v jednom smere;
- keď sa impulz aplikuje na základne tranzistorov Q2 a Q3 na otvorenie križovatky, prúd bude prúdiť v opačnom smere v porovnaní s predchádzajúcim a nastane spätný pohyb;
- párové otvorenie tranzistorov Q1 a Q3, Q2 a Q4 vedie k brzdeniu rotora;
- otvorenie tranzistorov v sekvencii Q1 a Q2 alebo Q3 a Q4 je úplne neprijateľné, pretože spôsobí skrat v obvode.
Pomocou obvodu H-mosta na riadenie prevádzky jednosmerného motora môžete realizovať kompletnú sadu operácií pre elektrický stroj bez nutnosti opätovného pripojenia elektród. Vzhľadom na obtiažnosť výberu tranzistorov a ich pripojenie k obvodu H-mosta je oveľa jednoduchšie používať už existujúce ovládače, ktoré majú túto funkciu. Medzi nimi sú najobľúbenejšie ovládače L293D a L298N.
Pri porovnaní týchto dvoch ovládačov je potrebné poznamenať, že model L298N je lepší ako L293D v prevádzkových parametroch, ako aj dostupných možnostiach. Napriek tomu, že L293D je lacnejší model, L298N sa vďaka svojim významným výhodám začal používať oveľa častejšie. Preto v tomto príklade berieme do úvahy princíp riadenia motora pomocou ovládača L298N a dosky Arduino.
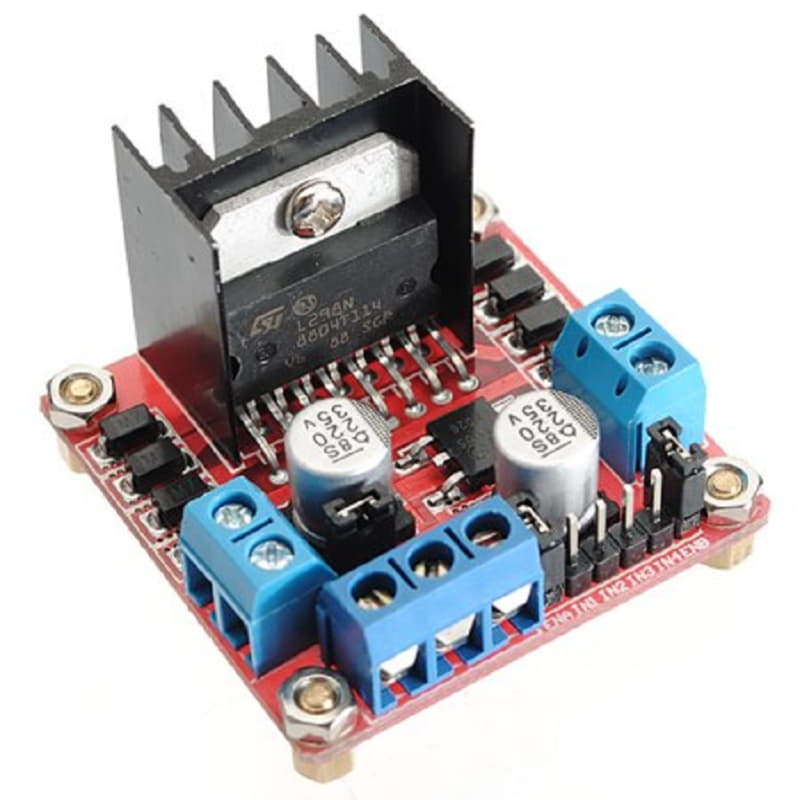
Čo je ovládač L298N?
Táto doska obsahuje mikroobvod a 15 výstupov na generovanie riadiacich signálov. Je určený na prenos signálov do pracovných častí indukčného typu - vinutia motora, cievky relé atď. Konštrukčne, L298N umožňuje pripojiť až dva takéto prvky, napr. Cez neho môžete súčasne ovládať dva krokové motory.
Nižšie uvedený diagram znázorňuje príklad distribúcie kolíka L298N z pracovného čipu.
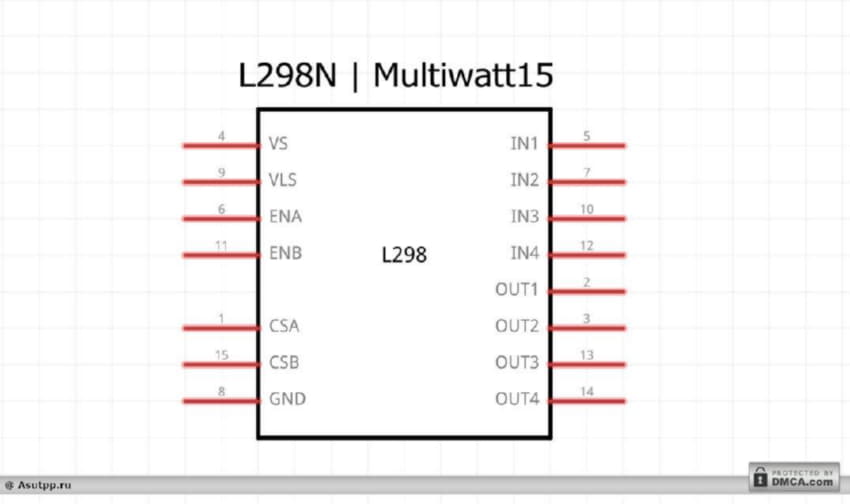
- Vss - napájanie logických obvodov v 5V;
- GND - nulový výstup (aka telo);
- INPUT1, INPUT 2, INPUT 3, INPUT 4 - umožňujú plynulé zvyšovanie a znižovanie rýchlosti otáčania motora;
- OUTPUT1, OUTPUT2 - vodiče pre napájanie prvej indukčnej záťaže;
- OUTPUT3, OUTPUT4 - vodiče pre napájanie druhej indukčnej záťaže;
- Vs - výstup pre spínaný výkon;
- ENABLE A, B - kolíky, pomocou ktorých sa kanály samostatne ovládajú, môžu vytvoriť aktívny a pasívny režim (s nastaviteľnou rýchlosťou otáčania a so stanovenou rýchlosťou);
- CURRENT SENSING A, B - závery pre nastavenie aktuálneho režimu.
Princíp riadenia motora s Arduino a vodičom L298N
Vďaka zabudovanému mostíku v ovládači L298N táto doska umožňuje súčasné ovládanie dvoch elektrických strojov z dvoch párov kolíkov naraz. Logický obvod v tomto zariadení pracuje s napätím 5V a výkon samotných elektrických strojov môže byť do 45V vrátane. Maximálny povolený prúd pre jeden kanál dosky je 2A.
Tento ovládač má spravidla modulárnu konštrukciu, vďaka ktorej modul obsahuje pracovné prvky, výstupy a konektory potrebné na prenos riadiacich signálov. Príklad takéhoto ovládača je znázornený na obrázku nižšie:
Teraz analyzujeme, ako sa vykonáva riadenie motora pomocou ovládača L298N. Motor je pripojený na svorky svorkovnice - pár na napájanie každého motora. Zvyšné svorky sú určené na napájanie plus a mínus, ako aj na prijímanie podpätia (sú napájané určitou úrovňou napájacieho napätia, z ktorého motory pracujú, a interný menič ho znižuje na 5V pre vlastné logické obvody). Zásuvné výstupy dosky vykonávajú pri generovaní pracovných signálov moduláciu šírky impulzu.
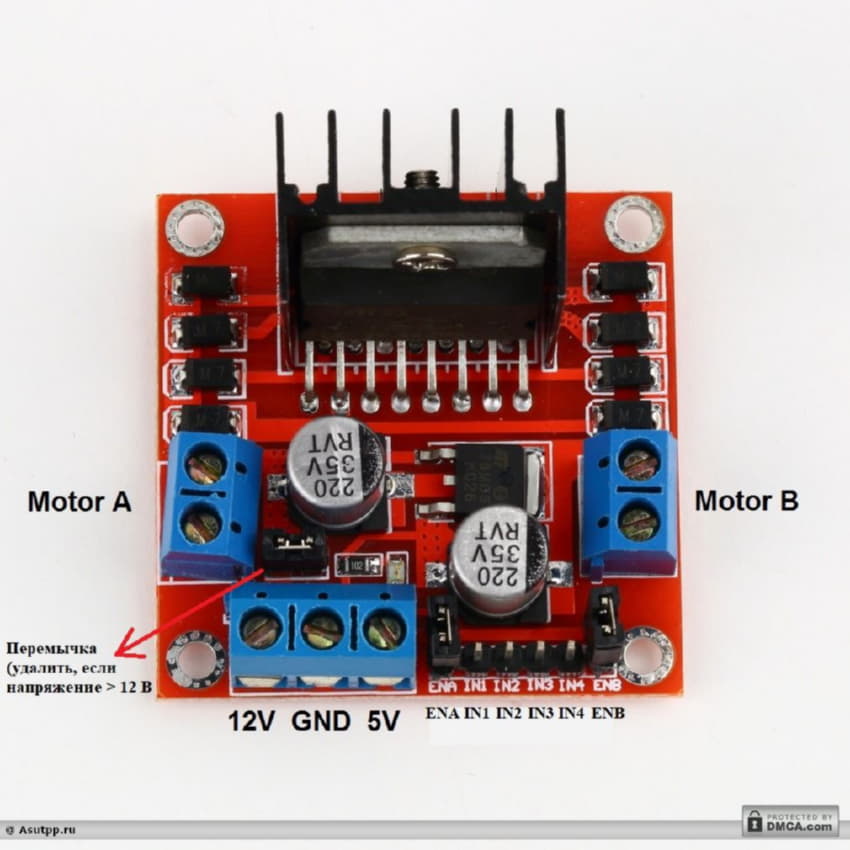
Treba poznamenať, že terminál s tromi terminálmi napája nielen dosku s napájacím napätím, ale tiež umožňuje, aby bol už konvertovaný na vlastné potreby vodiča 5V, ako je znázornené na obrázku vyššie. Tento výstup môže byť použitý na napájanie rovnakého zariadenia Arduino alebo na iné zariadenia, ktoré sú napájané 5V.
Dôležitým momentom pre získanie 5V z tohto výstupu terminálu je inštalácia čierneho prepojky, ktorá je zodpovedná za konverziu inej úrovne napätia ako 5 V za predpokladu, že jej úroveň je nižšia ako 12V. Ak je úroveň napájacieho napätia vyššia ako 12V, musí byť prepojka odstránená, pretože interný menič nie je pre ňu určený a samotná doska musí byť napájaná z 5V cez tretí výstup tej istej svorkovnice.
Jednoduchý príklad Arduina s ovládačom L298N
Teraz zvážime príklad jednoduchého systému zdieľania Arduino a L298N. Táto možnosť vám umožňuje ovládať rýchlosť otáčania hriadeľa a jeho smer z jednosmerného motora. Na tento účel sa na PC nastaví špeciálny program, ktorý určí generovanie PWM signálu z L298N a smer prúdenia elektrického prúdu cez H-mostík. Samozrejme, že pre vytvorenie systému bude vyžadovať niekoľko ďalších komponentov, ktoré umožnia pripojiť vodiča, Arduino, počítač a motory.
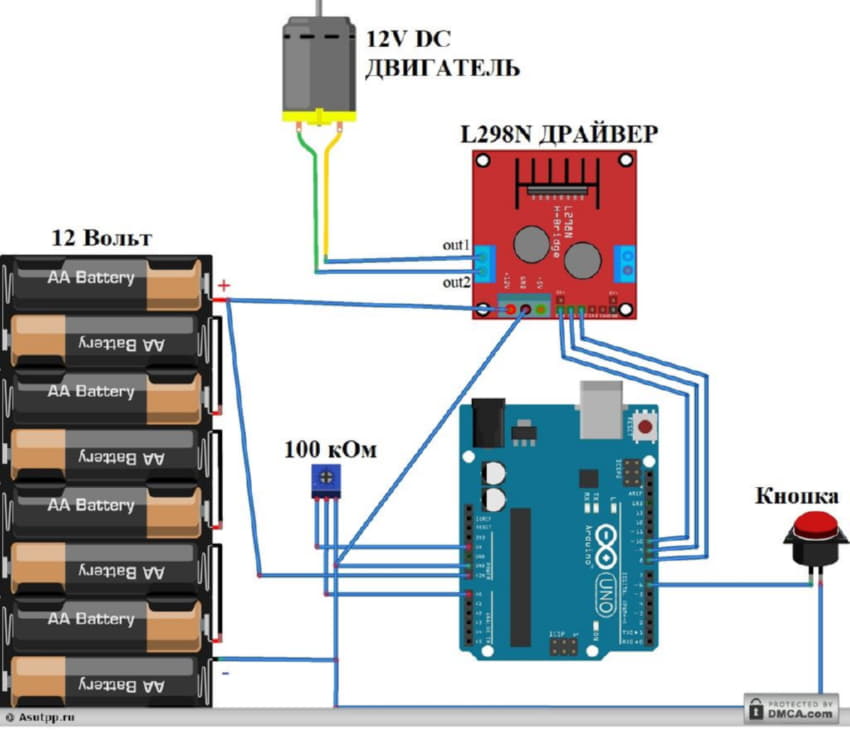
Zoznam potrebných komponentov na montáž systému: \ t
- Arduino UNO - najjednoduchší model linky, ale jeho funkčnosť bude viac než dosť. Ak použijete pokročilejšiu verziu, bude to tiež robiť dobre.
- Ovládač L298N nie je cenovo najdostupnejším ovládačom, ale nemôžete ho nahradiť iným, pretože princíp fungovania podobných modelov môže byť úplne odlišný.
- 12 V motor - v tomto príklade sa používa elektrický DC stroj.
- Potenciometer 100 kΩ.
- Tlačidlo na prepnutie obvodu.
- Napájanie 12 V - môže sa objaviť ľubovoľná možnosť, vrátane niekoľkých prstových batérií.
- Poplatok za inštalačné položky.
- Pripojovacie vodiče, najlepšie s pripravenými tátovými / maticovými zástrčkami.
| komponentov | špecifikácia | Počet | Kde kúpiť |
|---|---|---|---|
| Arduino | UNO Rev3.0 | 1 | odkaz |
| vodič | L298N | 1 | odkaz |
| Mini motor | 12V, DC, 6000 ot / min | 1 | odkaz |
| Výkonová jednotka | 12 voltov | 1 | odkaz |
| gombík | Micro SMD SMT | 1 | odkaz |
| potenciometer | 100 kΩ | 1 | odkaz |
| Pripojovacie vodiče | Otec, mama | odkaz |
Úplný kód projektu:
 Riadenie jednosmerného motora pomocou Arduino UNO (491 bytes, stiahnuté: 104)
Riadenie jednosmerného motora pomocou Arduino UNO (491 bytes, stiahnuté: 104)
Praktická aplikácia.
Programovanie práce elektromotorov je široko používané v robotike, napríklad váš vynález, vybavený kolesami, bude schopný pohybovať sa dopredu a v opačnom smere. Ako vidíte, spoločná práca Arduina a vodiča L298N dokáže tento problém vyriešiť bez problémov. Zároveň môžete zaistiť súčasnú prevádzku dvoch motorov naraz z jedného vodiča, to znamená, že ovládate dve kolesá naraz a nezávisle od seba.
V ďalšom uskutočnení môžu motory riadené Arduinom a vodičom L298N pohybovať rukami robota v smere dopredu a dozadu, pohybovať sa pozdĺž lineárnej dráhy atď. Úplný zoznam funkcií dosky Arduino a vodiča L298N je obmedzený len vašou predstavivosťou, takže pre nich môžete nájsť zaujímavé aplikácie.