
- Všeobecné informácie, zariadenie, rozsah
- Princíp činnosti
- Rozdielový zberač a bezkartáčový motor
- Ako začať bezkefový motor?
- Ovládanie bezkartáčového motora
- Trojfázový bezkartáčový jednosmerný motor
- Výhody a nevýhody
Pomôžte rozvoju stránky a zdieľajte článok s priateľmi!
Domácnosť a zdravotnícke zariadenia, aeromodelling, potrubné uzávery pohonov plynovodov a ropovodov - to nie je úplný zoznam aplikácií bezkartáčových jednosmerných motorov. Pozrime sa na štruktúru a fungovanie týchto elektromechanických pohonov, aby sme lepšie porozumeli ich výhodám a nevýhodám.
Všeobecné informácie, zariadenie, rozsah
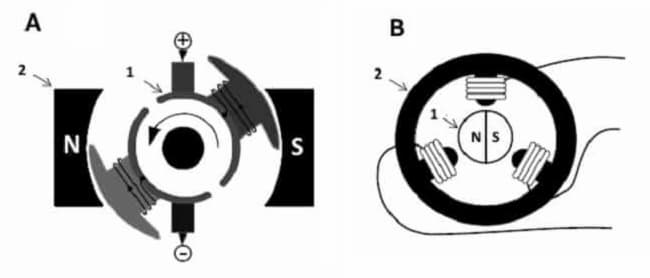
Jedným z dôvodov záujmu o databázu je zvýšená potreba vysokorýchlostných mikromotorov s presným určením polohy. Vnútorná štruktúra takýchto pohonov je znázornená na obr.
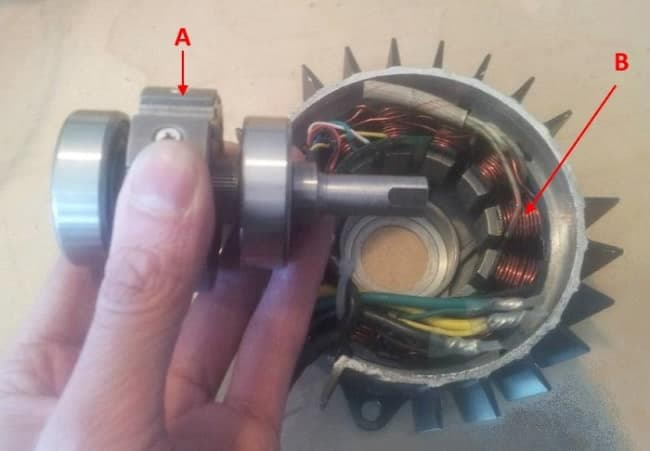
Ako vidíte, konštrukcia je rotor (kotva) a stator, prvý má permanentný magnet (alebo niekoľko magnetov usporiadaných v určitom poradí) a druhý je vybavený cievkami (B) na vytvorenie magnetického poľa.
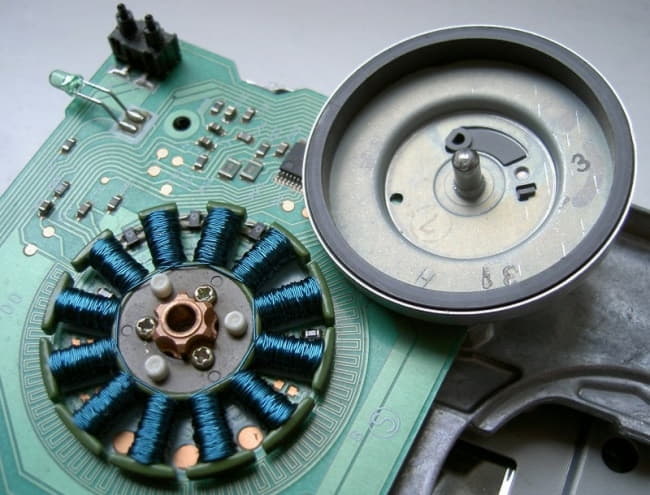
Je pozoruhodné, že tieto elektromagnetické mechanizmy môžu byť buď s vnútornou kotvou (tento typ konštrukcie je možné vidieť na obr. 2) alebo externe (pozri obr. 3).
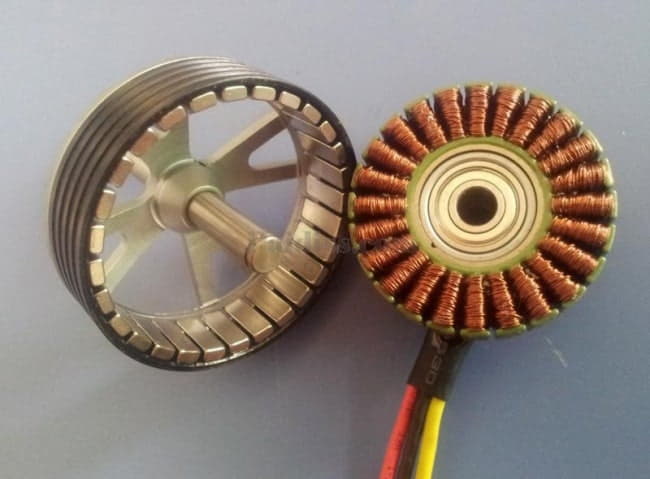
Preto má každá zo štruktúr špecifický rozsah. Zariadenia s vnútornou kotvou majú vysokú rýchlosť otáčania, preto sa používajú v chladiacich systémoch, ako elektrárne na drony atď. Externé rotorové pohony sa používajú tam, kde sa vyžaduje presná poloha a odolnosť proti preťaženiu krútiaceho momentu (robotika, zdravotnícke zariadenia, CNC stroje atď.).
Princíp činnosti
Na rozdiel od iných pohonov, napríklad asynchrónneho stroja so striedavým prúdom, DB vyžaduje špeciálny regulátor, ktorý obsahuje vinutia, takže vektory magnetického poľa armatúry a statora sú navzájom kolmé. To znamená, že ovládač zariadenia reguluje krútiaci moment pôsobiaci na kotvu databázy. Tento proces je jasne znázornený na obr.
Ako vidíme, pre každé posunutie kotvy je potrebné vykonať určitú komutáciu vo vinutí statora bezkartáčového motora. Takýto princíp činnosti neumožňuje plynule ovládať rotáciu, ale dáva príležitosť rýchlo získať hybnosť.
Rozdielový zberač a bezkartáčový motor
Pohon typu kolektora sa líši od databázy ako v konštrukčných prvkoch (pozri obr. 5), tak aj v princípe činnosti.
Zvážte rozdiely v dizajne. Z obr. 5 je zrejmé, že rotor (1 na obr. 5) motora kolektorového typu, na rozdiel od bezkartáčového motora, má cievky, ktoré majú jednoduchú schému navíjania, a na statore sú namontované permanentné magnety (zvyčajne dva) (2 na obr. 5). ). Okrem toho je na hriadeli, ku ktorému sú pripojené kefy, nainštalovaný kolektor, ktorý napája vinutia kotvy.
Stručne povedzte o princípe kolektorových strojov. Keď je napätie privedené na jednu z cievok, je excitované a vytvára sa magnetické pole. Interaguje s permanentnými magnetmi, čo spôsobuje, že sa kotva a kolektor nachádzajú na nej. Výsledkom je, že napájanie je privádzané do druhého vinutia a cyklus sa opakuje.
Frekvencia otáčania kotvy tohto usporiadania je priamo závislá od intenzity magnetického poľa, ktoré je zase priamo úmerné napätiu. To znamená, že na zvýšenie alebo zníženie rýchlosti stačí zvýšiť alebo znížiť úroveň výživy. Pre spätný chod je potrebné prepnúť polaritu. Tento spôsob riadenia nevyžaduje špeciálny regulátor, pretože regulátor zdvihu môže byť vyrobený na základe premenlivého odporu a konvenčný spínač bude pracovať ako menič.
V predchádzajúcej časti sme sa zaoberali konštrukčnými vlastnosťami bezkartáčových motorov. Ako si pamätáte, ich pripojenie vyžaduje špeciálny kontrolér, bez ktorého jednoducho nebudú fungovať. Z toho istého dôvodu nemôžu byť tieto motory použité ako generátor.
Za zmienku tiež stojí, že v niektorých pohonoch tohto typu sú pre efektívnejšie riadenie polohy rotora sledované pomocou Hallových senzorov. To výrazne zlepšuje výkon bezkartáčových motorov, ale vedie k vyšším cenám a tak drahému dizajnu.
Ako začať bezkefový motor?
Aby boli pohony tohto typu funkčné, bude potrebný špeciálny regulátor (pozri obr. 6). Bez neho je spustenie nemožné.
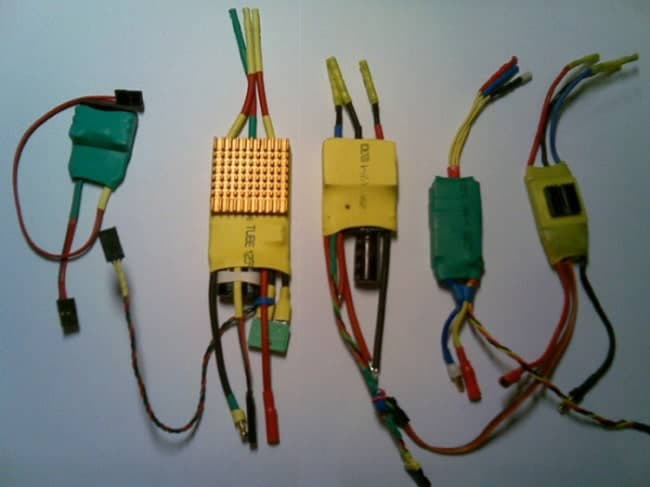
Zber takéhoto zariadenia sám o sebe nemá zmysel, je lacnejšie a spoľahlivejšie sa pripraviť. Môžete si ho vyzdvihnúť podľa nasledujúcich charakteristík, ktoré sú typické pre ovládače kanálov pwm:
- Maximálna prípustná prúdová sila, táto charakteristika je daná pre normálnu prevádzku zariadenia. Výrobcovia často tento parameter uvádzajú v názve modelu (napríklad Phoenix-18). V niektorých prípadoch sa hodnota udáva pre špičkový režim, ktorý môže regulátor niekoľko sekúnd podporovať.
- Maximálna hodnota štandardného napätia pre nepretržitú prevádzku.
- Odpor vnútorných obvodov regulátora.
- Prípustný počet otáčok je uvedený v otáčkach za minútu. Nad touto hodnotou regulátor neumožní zvýšenie rotácie (obmedzenie sa realizuje na úrovni programu). Všimnite si, že rýchlosť otáčania je vždy uvedená pre bipolárne pohony. Ak je pár pólov väčší, hodnota by sa mala vydeliť ich číslom. Napríklad počet je 60000 ot / min, preto pre 6-magnetický motor bude rýchlosť otáčania 60000/3 = 20000 prm.
- Frekvencia generovaných impulzov, pre väčšinu regulátorov, tento parameter je v rozsahu od 7 do 8 kHz, drahšie modely umožňujú preprogramovať parameter a zvýšiť ho na 16 alebo 32 kHz.
Prvé tri charakteristiky určujú výkon databázy.
Ovládanie bezkartáčového motora
Ako bolo uvedené vyššie, spínacie riadenie hnacích vinutí je riadené elektronikou. Na určenie, kedy sa má prepínač vykonať, vodič monitoruje polohu kotvy pomocou Hallových snímačov. Ak pohon nie je vybavený takýmito detektormi, potom sa berie do úvahy spätný EMF, ktorý sa vyskytuje v neprepojených cievkach statora. Regulátor, ktorý je v podstate hardvérový softvérový komplex, monitoruje tieto zmeny a nastavuje poradie spínania.
Trojfázový bezkartáčový jednosmerný motor
Väčšina databáz sa vykonáva v trojfázovom prevedení. Na riadenie takéhoto pohonu má regulátor jednosmerný trojfázový pulzný menič (pozri obrázok 7).
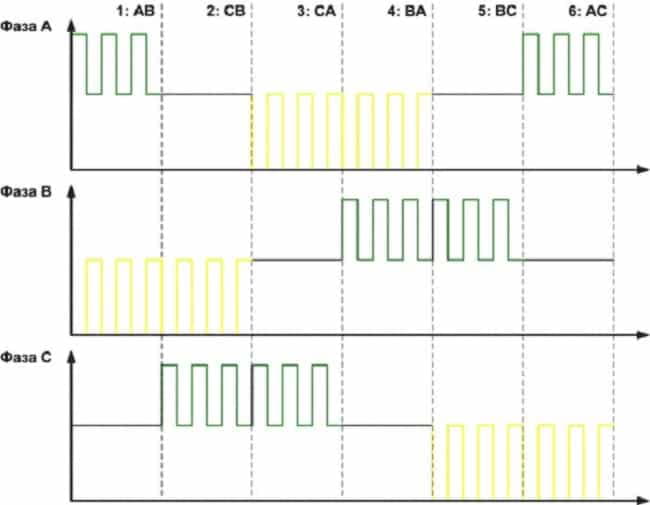
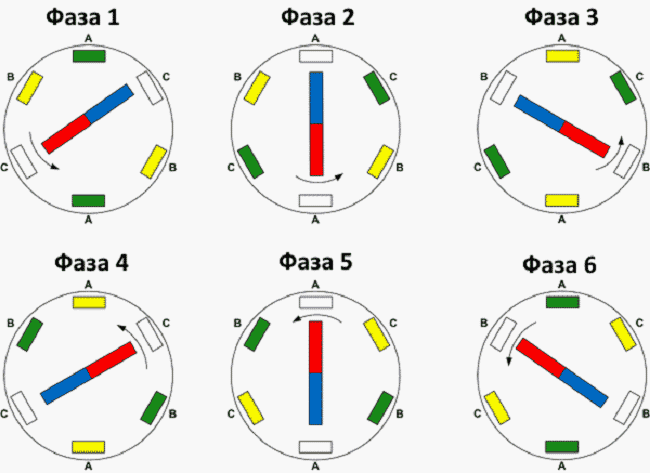
Aby bolo možné vysvetliť, ako takýto motor ventilu funguje, je potrebné spolu s obrázkom 7 zvážiť obrázok 4, kde sú striedavo znázornené všetky stupne pohonu. Píšeme ich:
- Pozitívny impulz sa privádza do cievok „A“, zatiaľ čo záporný impulz sa privádza do „B“, čím sa kotva pohne. Senzory zistia jeho pohyb a vydajú signál pre ďalšiu komutáciu.
- Cievka "A" je vypnutá a pozitívny impulz prechádza do "C" ("B" zostáva nezmenený), potom je signál odoslaný na ďalšiu sadu impulzov.
- Na “C” - pozitívne, “A” - negatívne.
- Pár "B" a "A", ktoré prijímajú pozitívne a negatívne impulzy.
- Pozitívny impulz sa aplikuje na „B“ a záporne na „C“.
- Cievky „A“ sú zapnuté (+ je napájané) a na „C“ sa opakuje negatívny impulz. Potom sa cyklus opakuje.
V zdanlivej jednoduchosti riadenia je veľa ťažkostí. Je potrebné nielen sledovať polohu kotvy, aby sa vytvorila ďalšia séria impulzov, ale aj regulovať rýchlosť otáčania nastavením prúdu v cievkach. Okrem toho by ste mali zvoliť najoptimálnejšie parametre pre zrýchlenie a spomalenie. Treba tiež pamätať na to, že regulátor by mal byť vybavený jednotkou, ktorá umožňuje ovládať jeho prevádzku. Vzhľad takéhoto multifunkčného zariadenia je možné vidieť na obr.

Výhody a nevýhody
Elektrický bezkartáčový motor má mnoho výhod, a to: \ t
- Životnosť je oveľa dlhšia ako u bežných kolektorov.
- Vysoká účinnosť.
- Rýchle nastavenie maximálnej rýchlosti otáčania.
- Je silnejší ako CD.
- Neprítomnosť iskier počas prevádzky umožňuje použitie pohonu v podmienkach požiaru.
- Nevyžaduje sa žiadne dodatočné chladenie.
- Jednoduchá obsluha.
Teraz zvážte nevýhody. Významnou nevýhodou, ktorá obmedzuje používanie databázy, je ich relatívne vysoká cena (s prihliadnutím na cenu vodiča). Medzi nevýhody treba pripísať neschopnosť používať databázu bez vodiča, dokonca aj pre krátkodobé začlenenie, napríklad na testovanie výkonu. Problém opraviť, najmä ak je potrebné previnúť.